Navigationsmethode: Laser-SLAM
Ladekapazität: 1000kg
Wenderadius: 1600 mm
Hubhöhe: ≤4000mm
Gehgeschwindigkeit: ≤1.2 m/s
Gabelbreite: 280/750 mm
Batterie: Lithiumbatterie
Abmessungen: 2800 * 1700 * 2800mm
Antriebsmethode: Servo-Radantrieb
Lademethode: Manuelles/automatisches Laden
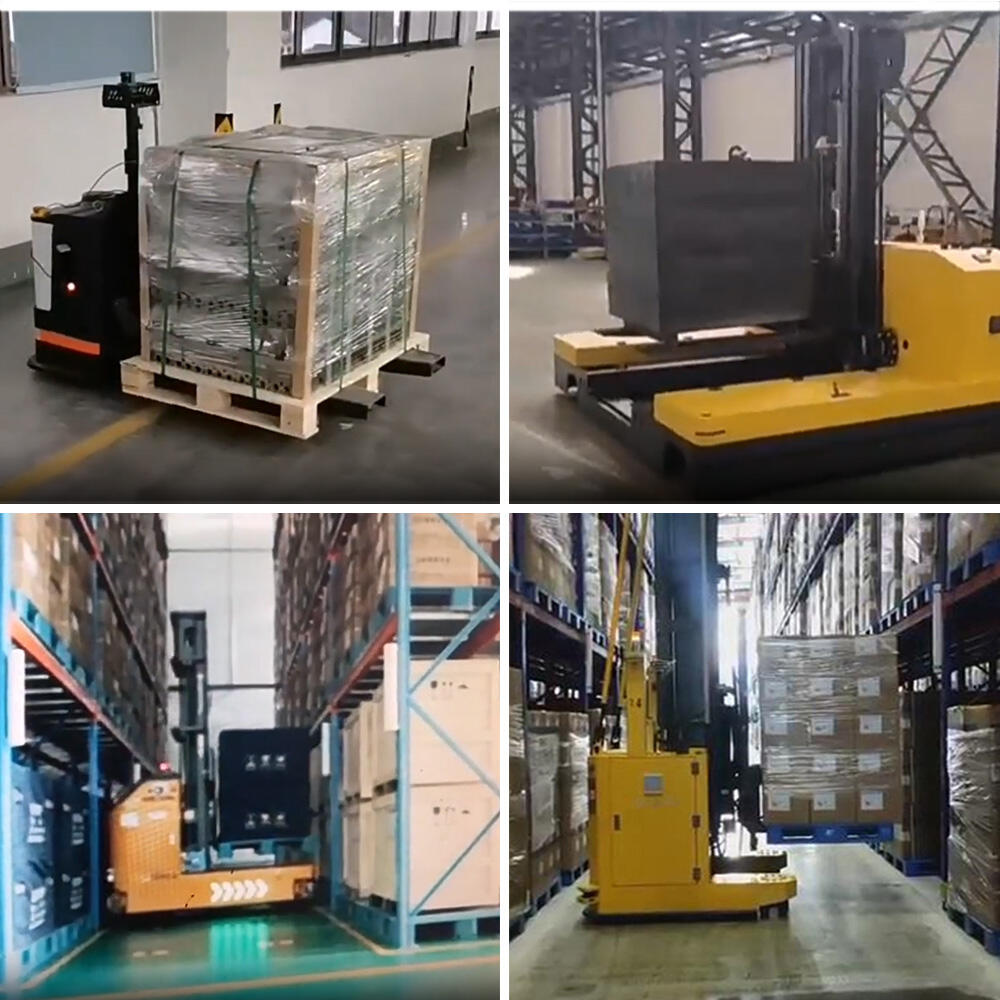
Das Laser-Stack-Gabelstapler-AGV mit einer Last von 2000 kg kann bis zu 6000 mm heben. Basierend auf Daten, die von LiDAR-Sensoren erhalten werden, wird der SLAM-Algorithmus verwendet, um Karten zu erstellen und Positionierungs- und Navigationsfunktionen während der Roboterbewegung auszuführen. Die fortschrittliche Lasernavigationstechnologie erfordert keine Markierungen auf dem Boden oder reflektierende Platten. Der Roboter kann während seiner Bewegung automatisch anhalten/Hindernissen ausweichen, Waren auf die Gabel nehmen und sie an bestimmten Orten ablegen. Ausgestattet mit einer autonomen Ladefunktion. Der Roboter verfügt über mehrere Sicherheitsschutzstrategien in Bezug auf Software und Hardware und ist rund um den Roboter mit Sicherheitskontakten und Not-Aus-Schaltern ausgestattet, um allgemeine Sicherheit und Stabilität zu gewährleisten.
| Charakteristisch | Energieart | Die elektrische | |
| Fahrweise | automatische | ||
| Navigationsmodus | Laser | ||
| Nennlast | Q (kg) | 2000 | |
| Last Center | C (mm) | 600 | |
| Lastabstand | X (mm) | 550 | |
| Radabstand | J (mm) | 1180 | |
| Antriebsradgröße | (Mm) | Φ250 * 85 | |
| Größe des Hilfsrads | (Mm) | Φ210 * 70 | |
| Spurbreite vorn | b11 (mm) | 2050 | |
| Größe | Gesamtgröße | h1 (mm) | 2800 |
| Hubhöhe | h3 (mm) | 6000 | |
| Gabelhöhe (niedrigste Stelle) | h13 (mm) | 60 | |
| Gesamtlänge | L1 (mm) | 2800 | |
| Fahrzeuglänge | L2 (mm) | 540 | |
| Gesamtbreite | b1 (mm) | 1700 | |
| Gabelgröße | s / e / l (mm) | 45X140X1150 | |
| Gabelaußenbreite | b5 (mm) | 280/750 | |
| Gabelschwader | L4 (mm) | 1200 | |
| Minimale Bodenfreiheit | m2 (mm) | 60 | |
| Rechtwinkliger Stapelkanal, Breite Fach 1000 x 1200 mm | Ast (mm) | 1960 | |
| Wendekreis | Wa (mm) | 1600 | |
| Kennzahlen | Fahrgeschwindigkeit Leerlauf/Volllast | kmh | 7/8 |
| Hubgeschwindigkeit Leerlauf/Volllast | mm/s | 120/190 | |
| Senkgeschwindigkeit Leerlauf/Volllast | mm/s | 190/170 | |
| Vorwärts Geschwindigkeit | mm/s | 100/100 | |
| Maximale Steigfähigkeit Leer/Volllast | % | 3/3 | |
| Bremsmethode | Elektromagnetische Bremse | ||
| Motor | Antriebsmotorleistung | kw | 1*2 |
| Leistung des Lenkmotors | kw | 0.4*3 | |
| Hubmotorleistung | kw | 8.6 | |
| Lithiumbatterie Spannung/Kapazität | V / Ah | 48/210 | |
| Gewicht der Lithiumbatterie | kg | 150 | |
| Lenkmodus | Elektronische Lenkung | ||
1.Verteilung von Werkstattmaterial, Reduzierung der Zahl der Werkstattgänger und Schaffung einer umweltfreundlichen Chemiefabrik.
2. Durch die Stapelung von Fabriklagern wird die Lagerhaltung standardisierter und geordneter, wodurch die Raumnutzung und die Transporteffizienz vollständig verbessert werden.






Ein professionelles Unternehmen, das sich mit der Entwicklung, Herstellung und dem Vertrieb von Hebewerkzeugen und Stromversorgungssystemen beschäftigt.
 EN
EN
 AR
AR
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NEIN
NEIN
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 SQ
SQ
 HU
HU
 TH
TH
 TR
TR
 AF
AF
 MS
MS
 BN
BN
 MN
MN
 KK
KK
 KY
KY






