नेविगेशन विधि: लेज़र SLAM
भार धारण क्षमता: 1000किग्रा
मोड़ने की त्रिज्या: 1600मिमी
उठाने की ऊंचाई: ≤4000मिमी
चलने की गति: ≤1.2मी/से
फॉर्क की चौड़ाई: 280/750मिमी
बैटरी: लिथियम बैटरी
आयाम: 2800*1700*2800मिमी
ड्राइविंग मेथड: सर्वो पहिया ड्राइव
चार्जिंग मेथड: हाथ से/स्वचालित चार्जिंग
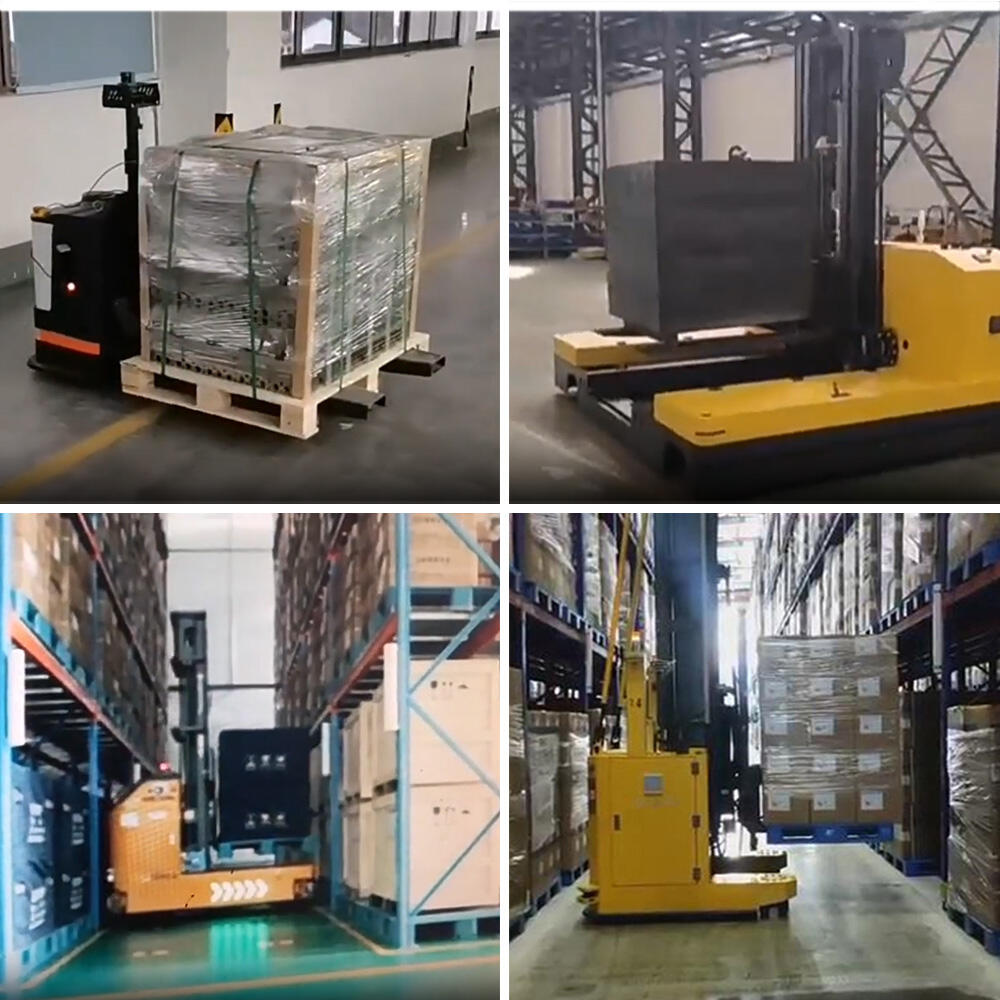
लेजर स्टैक फォर्कलिफ्ट AGV, 2000KG के बोझ के साथ, 6000MM तक उठा सकता है। लीडार सेंसरों से प्राप्त डेटा के आधार पर, SLAM एल्गोरिदम का उपयोग रोबोट के चलने के दौरान मानचित्र बनाने और स्थिति-निर्धारण और नेविगेशन कार्य करने के लिए किया जाता है। अग्रणी लेजर नेविगेशन प्रौद्योगिकी के लिए जमीन पर किसी भी चिह्न या प्रतिबिंबित पैनल की आवश्यकता नहीं होती है। रोबोट अपने चलने के दौरान स्वचालित रूप से बाधाओं को रोकने/अपने आप में बचने के लिए, सामान उठाने और उन्हें निर्दिष्ट स्थानों पर रखने के लिए युक्त है। स्वचालित रिचार्जिंग कार्य के साथ युक्त है। रोबोट सॉफ्टवेयर और हार्डवेयर के पहलूओं में कई सुरक्षा सुरक्षा रणनीतियों का डिज़ाइन करता है, और रोबोट के चारों ओर सुरक्षा संपर्क और आपातकालीन रोकथाम बटन युक्त हैं जो समग्र सुरक्षा और स्थिरता को सुनिश्चित करते हैं।
| विशेषता | पावर प्रकार | इलेक्ट्रिक | |
| ड्राइविंग प्रकार | स्वचालित | ||
| नेविगेशन मोड | लेजर | ||
| रेटेड लोड | Q (kg) | 2000 | |
| भार केंद्र | C (मिमी) | 600 | |
| भार दूरी | X (mm) | 550 | |
| व्हीलबेस | Y (mm) | 1180 | |
| ड्राइव पहिया आकार | (मिमी) | Φ250*85 | |
| सहायक पहिया आकार | (मिमी) | Φ210*70 | |
| आगे की पista की चौड़ाई | b11 (mm) | 2050 | |
| आकार | कुल ऊंचाई | h1 (मिमी) | 2800 |
| उठाने की ऊंचाई | h3 (मिमी) | 6000 | |
| फ़ॉर्क की ऊंचाई (निचली से) | h13 (मिमी) | 60 | |
| कुल लंबाई | L1 (mm) | 2800 | |
| वाहन की लंबाई | L2 (mm) | 540 | |
| कुल चौड़ाई | b1(मिमी) | 1700 | |
| कांटा का आकार | s/e/l (मिमी) | 45X140X1150 | |
| फ़ॉर्क बाहरी चौड़ाई | b5 (मिमी) | 280/750 | |
| फ़ॉर्क रेखा | L4 (मिमी) | 1200 | |
| न्यूनतम जमीन की ऊँचाई | M2(mm) | 60 | |
| दाएं कोण स्टैकिंग चैनल चौड़ाई, ट्रे 1000x1200mm | अस्ट(मिमी) | 1960 | |
| मोड़ने की त्रिज्या | वा(मिमी) | 1600 | |
| प्रदर्शन | चालक गति कोई भार नहीं/पूर्ण भार | किमी/घंटा | 7/8 |
| उठाने की गति कोई भार नहीं/पूर्ण भार | एमएम/एस | 120/190 | |
| गिराने की गति कोई भार नहीं/पूर्ण भार | एमएम/एस | 190/170 | |
| आगे की गति | एमएम/एस | 100/100 | |
| अधिकतम चढ़ाव क्षमता खाली/पूर्ण भार | % | 3/3 | |
| ब्रेकिंग विधि | इलेक्ट्रोमैगनेटिक ब्रेक | ||
| मोटर | ड्राइव मोटर पावर | किलोवाट | 1*2 |
| स्टीयरिंग मोटर पावर | किलोवाट | 0.4*3 | |
| उठाने वाले मोटर पावर | किलोवाट | 8.6 | |
| लिथियम बैटरी वोल्टेज/क्षमता | V/AH | 48/210 | |
| लिथियम बैटरी वजन | किलोग्राम | 150 | |
| स्टीयरिंग मोड | इलेक्ट्रॉनिक स्टीयरिंग | ||
1. कारखाने के सामग्री वितरण, कारखाने की राह के संचालकों को कम करना, और एक हरित रसायनीय कारखाना बनाना।
2. कारखाने के गॉदामों का स्टैकिंग करना भंडारण को अधिक मानकीकृत और क्रमबद्ध बनाता है, समय के उपयोग और परिवहन की कुशलता को पूरी तरह से बढ़ाता है।






उठाने के साधनों और विद्युत प्रणालियों के डिज़ाइन, निर्माण और विक्रय में लगी हुई एक पेशेवर इकाई।
 EN
EN
 AR
AR
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 SQ
SQ
 HU
HU
 TH
TH
 TR
TR
 AF
AF
 MS
MS
 BN
BN
 MN
MN
 KK
KK
 KY
KY






