Metodo di navigazione: Laser SLAM
Capacità di carico: 1000kg
Raggio di sterzata: 1600 mm
Altezza di sollevamento: ≤4000mm
Velocità di camminata: ≤1.2 m/s
Larghezza forcella: 280/750 mm
Batteria: batteria al litio
Dimensioni: 2800 * * 1700 2800mm
Metodo di guida: servoruota
Metodo di ricarica: ricarica manuale/automatica
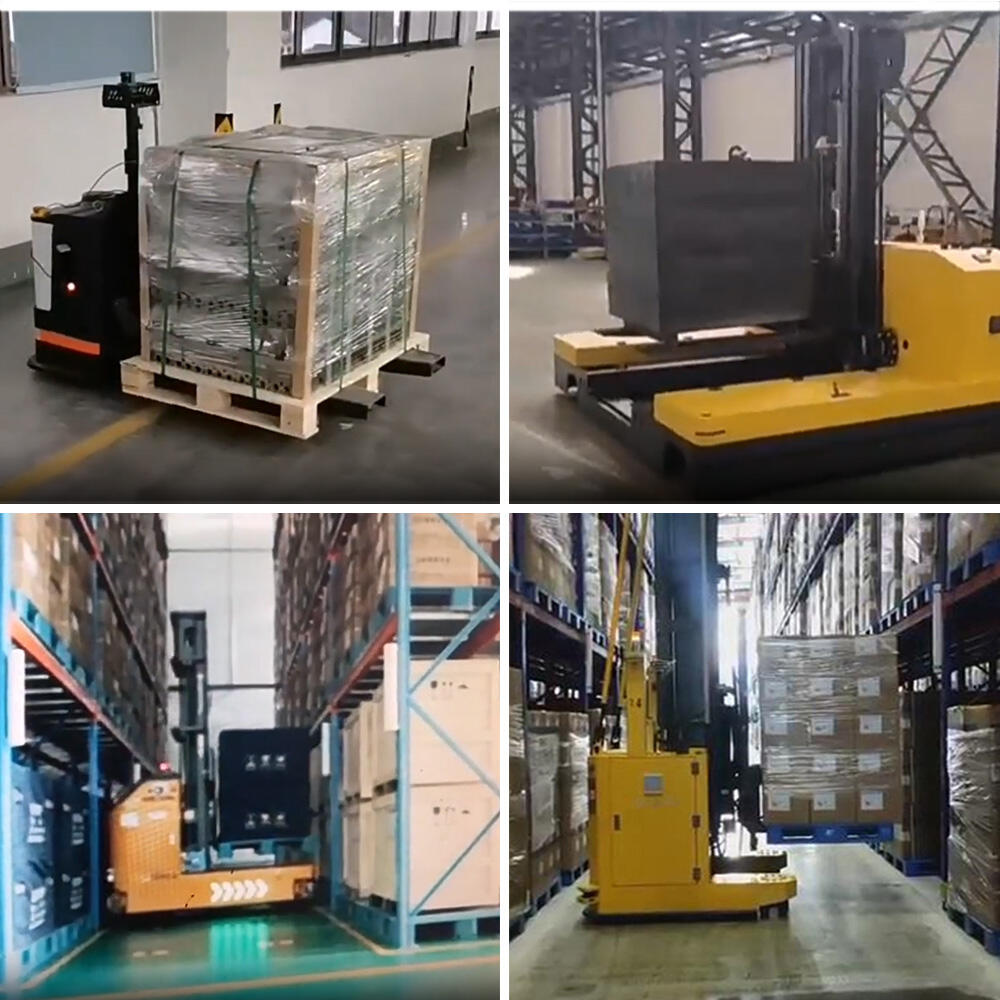
Il carrello elevatore laser AGV, con un carico di 2000 kg, può sollevare fino a 6000 mm. Sulla base dei dati ottenuti dai sensori LiDAR, l'algoritmo SLAM viene utilizzato per costruire mappe ed eseguire funzioni di posizionamento e navigazione durante il movimento del robot. La tecnologia avanzata di navigazione laser non richiede alcuna segnaletica sul terreno o pannelli riflettenti. Il robot può fermare/evitare automaticamente gli ostacoli durante il suo movimento, forcare la merce e posizionarla nei luoghi designati. Dotato di funzione di ricarica autonoma. Il robot progetta molteplici strategie di protezione della sicurezza in termini di software e hardware ed è dotato di contatti di sicurezza e pulsanti di arresto di emergenza attorno al robot per garantire sicurezza e stabilità complessive.
| Caratteristica | Tipo di alimentazione | Elettrico | |
| Tipo di guida | Automatico | ||
| Modalità di navigazione | Laser | ||
| Carico nominale | Quantità (kg) | 2000 | |
| Centro di carico | C (millimetro) | 600 | |
| Distanza di carico | X(mm) | 550 | |
| Interasse | Y (millimetro) | 1180 | |
| Dimensioni della ruota motrice | (Mm) | Φ250 * 85 | |
| Dimensioni ruota ausiliaria | (Mm) | Φ210 * 70 | |
| Larghezza carreggiata anteriore | b11 (millimetro) | 2050 | |
| Taglia | Altezza totale | h1 (millimetro) | 2800 |
| Altezza di sollevamento | h3 (millimetro) | 6000 | |
| Altezza della forca (al minimo) | h13 (millimetro) | 60 | |
| lunghezza totale | L1 (millimetro) | 2800 | |
| Lunghezza del veicolo | L2 (millimetro) | 540 | |
| Larghezza complessiva | b1 (mm) | 1700 | |
| Dimensione della forcella | s / e / l (millimetro) | 45X140X1150 | |
| Larghezza esterna della forcella | b5 (mm) | 280/750 | |
| Forca Rake | L4 (millimetro) | 1200 | |
| Distanza minima da terra | m2 (millimetro) | 60 | |
| Larghezza del canale di impilamento ad angolo retto, vassoio 1000x1200 mm | Ast (mm) | 1960 | |
| Raggio di rotazione | Wa (mm) | 1600 | |
| Performance | Velocità di guida senza carico/pieno carico | kmh | 7/8 |
| Velocità di sollevamento senza carico/pieno carico | mm/sec | 120/190 | |
| Velocità di abbassamento senza carico/pieno carico | mm/sec | 190/170 | |
| Velocità in avanti | mm/sec | 100/100 | |
| Capacità massima di arrampicata a vuoto/pieno carico | % | 3/3 | |
| Metodo di frenatura | Freno elettromagnetico | ||
| Il motore | Potenza del motore di azionamento | kw | 1*2 |
| Potenza del motore dello sterzo | kw | 0.4*3 | |
| Potenza del motore di sollevamento | kw | 8.6 | |
| Voltaggio/capacità della batteria al litio | V / Ah | 48/210 | |
| Peso della batteria al litio | kg | 150 | |
| Modalità di sterzo | Sterzo elettronico | ||
1. Distribuzione del materiale in officina, riduzione degli operatori nei corridoi dell'officina e creazione di una fabbrica chimica verde.
2. L'accatastamento dei magazzini di fabbrica rende lo stoccaggio più standardizzato e ordinato, migliorando completamente l'utilizzo dello spazio e l'efficienza dei trasporti.






Un'impresa professionale impegnata nella progettazione, produzione e vendita di strumenti di sollevamento e sistemi di alimentazione.
 EN
EN
 AR
AR
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 SQ
SQ
 HU
HU
 TH
TH
 TR
TR
 AF
AF
 MS
MS
 BN
BN
 MN
MN
 KK
KK
 KY
KY






