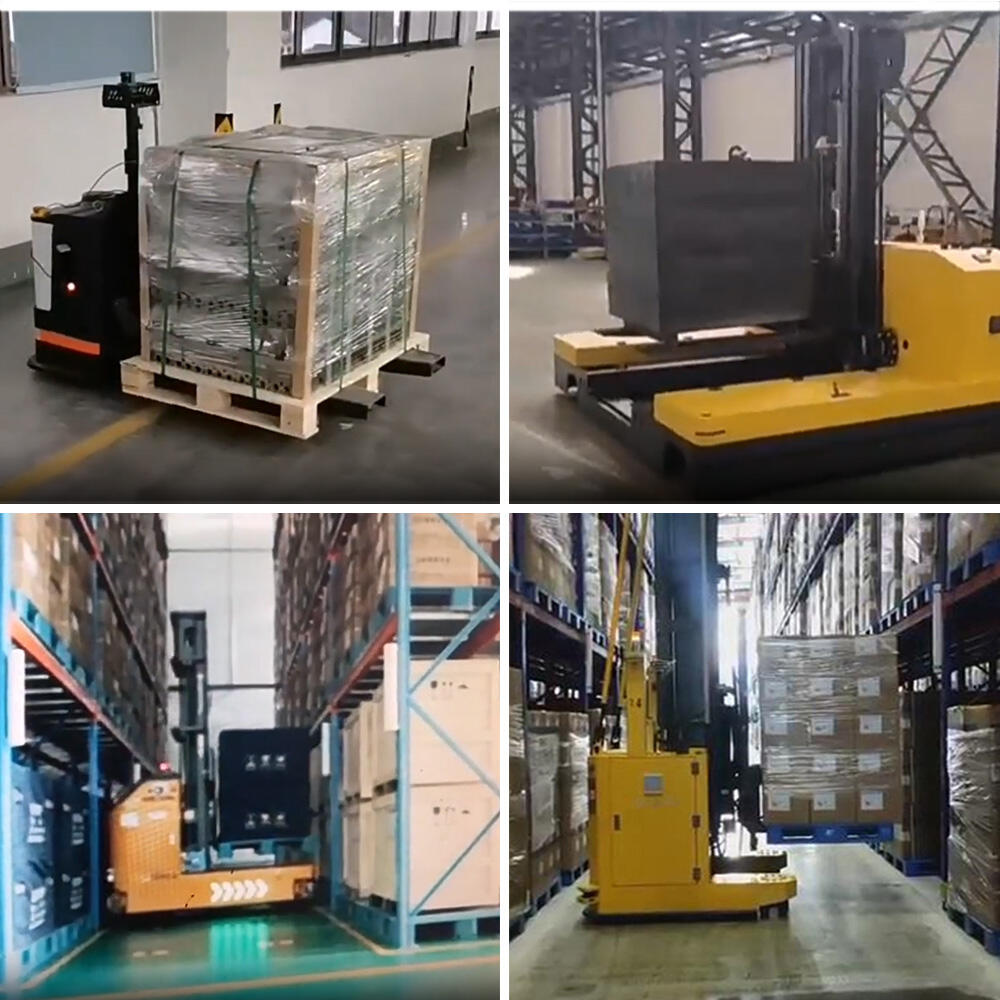
מלגזת ערימת לייזר AGV, עם עומס של 2000 ק"ג, יכולה להרים עד 6000 מ"מ. בהתבסס על נתונים המתקבלים מחיישני LiDAR, נעשה שימוש באלגוריתם SLAM לבניית מפות ולביצוע פונקציות מיקום וניווט במהלך תנועת הרובוט. טכנולוגיית ניווט מתקדמת בלייזר אינה דורשת שום סימונים על הקרקע או לוחות מחזירי אור. הרובוט יכול לעצור/להימנע אוטומטית ממכשולים במהלך תנועתו, לחלק סחורות ולהציב אותם במקומות ייעודיים. מצויד בפונקציית טעינה אוטונומית. הרובוט מעצב אסטרטגיות הגנה מרובות מבחינת תוכנה וחומרה, ומצויד במגעי בטיחות ולחצני עצירת חירום סביב הרובוט כדי להבטיח בטיחות ויציבות כללית.
| מאפיין | סוג צריכת חשמל | חשמלי | |
| סוג נהיגה | מכני עם סלילה אוטומטית | ||
| מצב ניווט | לייזר | ||
| טעינה מדורג | Q (ק"ג) | 2000 | |
| מרכז טעינה | C (מ"מ) | 600 | |
| מרחק עומס | X (מ"מ) | 550 | |
| בסיס גלגלים | Y (מ"מ) | 1180 | |
| גודל גלגל הנעה | (מ"מ) | Φ250 * 85 | |
| גודל גלגל עזר | (מ"מ) | Φ210 * 70 | |
| רוחב מסלול קדמי | b11 (מ"מ) | 2050 | |
| מידה | גובה סה"כ | h1 (מ"מ) | 2800 |
| הרמת גובה | h3 (מ"מ) | 6000 | |
| גובה המזלג (בנמוך ביותר) | h13 (מ"מ) | 60 | |
| אורך הכולל | L1 (מ"מ) | 2800 | |
| אורך הרכב | L2 (מ"מ) | 540 | |
| רוחב כולל | b1 (מ"מ) | 1700 | |
| גודל מזלג | s/e/l (מ"מ) | 45X140X1150 | |
| מזלג רוחב חיצוני | b5 (מ"מ) | 280/750 | |
| מזלג רייק | L4 (מ"מ) | 1200 | |
| אישור קרקע מינימלי | m2(מ"מ) | 60 | |
| רוחב ערוץ ערימה בזווית ישרה, מגש 1000x1200 מ"מ | אסט(מ"מ) | 1960 | |
| רדיוס הפנייה | ווא(מ"מ) | 1600 | |
| ביצוע | מהירות נסיעה ללא עומס/עומס מלא | ק"מ / שעה | 7/8 |
| מהירות הרמה ללא עומס/עומס מלא | מ"מ / שנייה | 120/190 | |
| הורדת מהירות ללא עומס/עומס מלא | מ"מ / שנייה | 190/170 | |
| מהירות קדימה | מ"מ / שנייה | 100/100 | |
| קיבולת טיפוס מקסימלית ריק/עומס מלא | % | 3/3 | |
| שיטת בלימה | בלם אלקטרומגנטי | ||
| מָנוֹעַ | כוח מנוע כונן | kw | 1*2 |
| כוח מנוע היגוי | kw | 0.4*3 | |
| כוח מנוע הרמה | kw | 8.6 | |
| מתח/קיבולת סוללת ליתיום | V / אה | 48/210 | |
| משקל סוללת ליתיום | kg | 150 | |
| מצב היגוי | היגוי אלקטרוני | ||
1. הפצת חומרי סדנא, צמצום מפעילי מעברי בית מלאכה ויצירת מפעל כימיקלים ירוק.
2. הערימה של מחסני המפעל הופכת את האחסנה לסטנדרטי ומסודר יותר, ומשפרת באופן מלא את ניצול החלל ויעילות התחבורה.

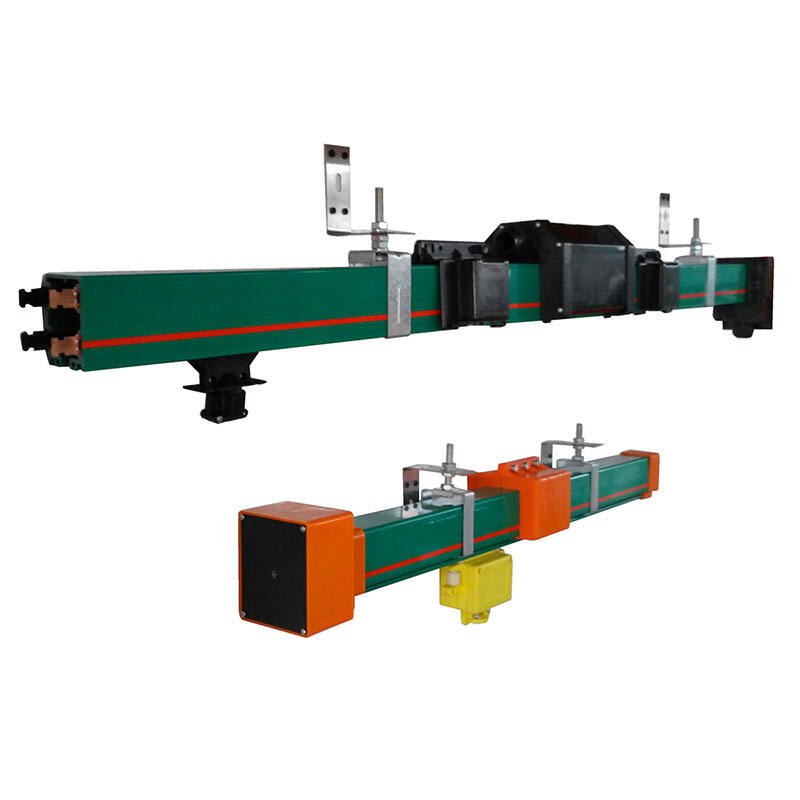
מיזם מקצועי העוסק בתכנון, ייצור ומכירה של כלי הרמה ומערכות אספקת חשמל.
 EN
EN
 AR
AR
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 לא
לא
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 SQ
SQ
 HU
HU
 TH
TH
 TR
TR
 AF
AF
 MS
MS
 BN
BN
 MN
MN
 KK
KK
 KY
KY