Metoda nawigacji: Laser SLAM
Pojemność obciążeniowa: 1000kg
Promień skrętu: 1600mm
Wysokość podnoszenia: ≤4000mm
Prędkość chodzenia: ≤1.2m/s
Szerokość widła: 280/750mm
Bateria: Litewskie baterie
Wymiary: 2800*1700*2800mm
Metoda napędzania: Napedzanie kołem serwospornikowym
Metoda ładowania: Ręczne/ladowanie automatyczne
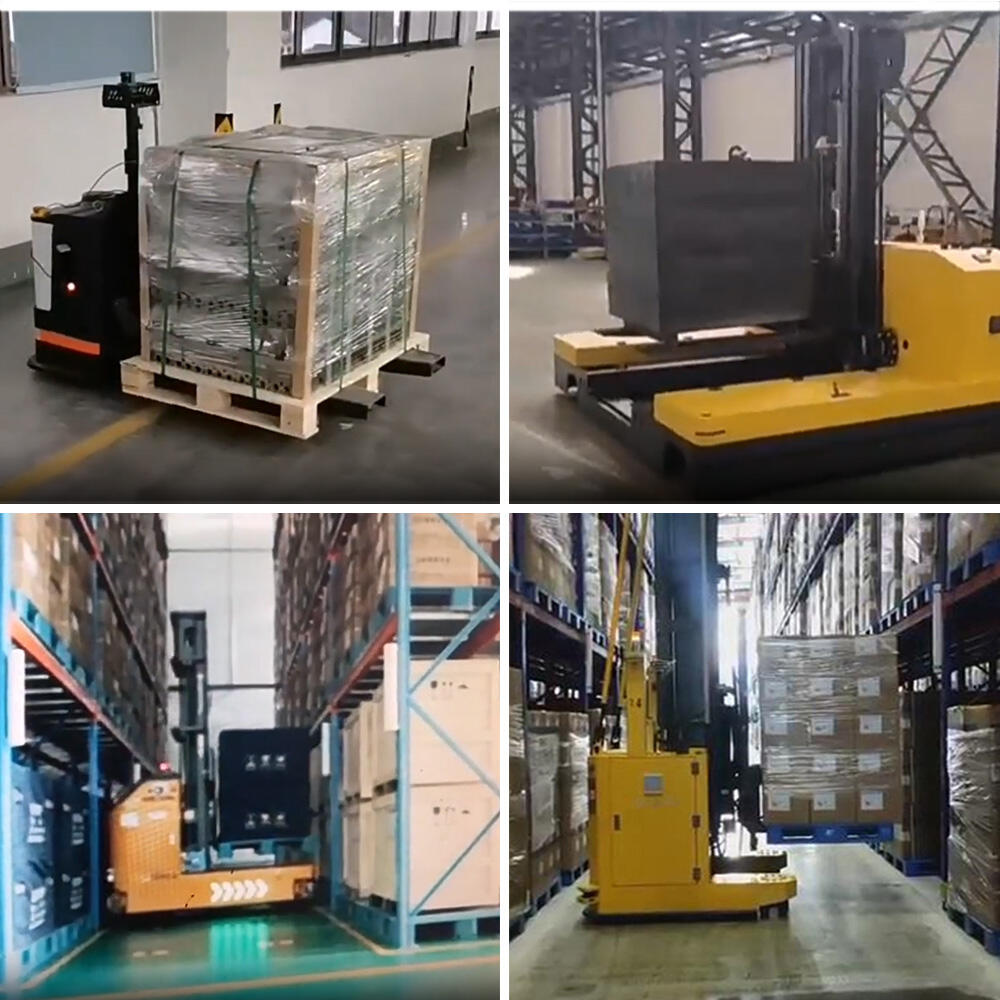
Widłowiec AGV z napędem laserowym, o nośności 2000KG, może podnosić do 6000MM. Na podstawie danych uzyskanych z czujników LiDAR, algorytm SLAM służy do konstrukcji map oraz wykonywania funkcji pozycjonowania i nawigacji podczas ruchu robota. Zaawansowana technologia nawigacji laserowej nie wymaga żadnych znaczników na podłożu ani paneli refleksyjnych. Robot może automatycznie zatrzymywać się/unikać przeszkód podczas swojego ruchu, przechwytywać towary widłami i umieszczać je w wyznaczonych miejscach. wyposażony w funkcję autonomicznego ładowania. Robot projektuje wiele strategii ochrony bezpieczeństwa zarówno w zakresie oprogramowania, jak i sprzętu, a także jest wyposażony w kontakty bezpieczeństwa i przyciski awaryjnego zatrzymania wokół robota, aby zapewnić ogólną bezpieczność i stabilność.
| Cechy | Typ mocy | Elektryczny | |
| typ jazdy | automatyczna | ||
| tryb nawigacji | Laserowe | ||
| Obciążenie nominalne | Q (kg) | 2000 | |
| Centrum obciążenia | C (mm) | 600 | |
| Odległość ładunkowa | X (mm) | 550 | |
| Rozstaw osi | Y (mm) | 1180 | |
| Rozmiar napędowego koła | (mm) | Φ250*85 | |
| Rozmiar koła pomocniczego | (mm) | Φ210*70 | |
| Szerokość toru przedniego | b11 (mm) | 2050 | |
| Rozmiar | Całkowita wysokość | h1 (mm) | 2800 |
| Wysokość podnoszenia | h3 (mm) | 6000 | |
| Wysokość widła (w najniższej pozycji) | h13 (mm) | 60 | |
| Całkowita długość | L1 (mm) | 2800 | |
| Długość pojazdu | L2 (mm) | 540 | |
| Całkowita szerokość | b1 (mm) | 1700 | |
| Rozmiar widelca | s/e/l (mm) | 45X140X1150 | |
| Zewnętrzna szerokość widła | b5 (mm) | 280/750 | |
| Nachylenie widła | L4 (mm) | 1200 | |
| Minimalny prześwit | M2(mm) | 60 | |
| Szerokość kanału stosującego pod kątem prostym, taca 1000x1200mm | Ast(mm) | 1960 | |
| Promień obrotu | Wa(mm) | 1600 | |
| Wydajność | Prędkość jazdy bez obciążenia/z obciążeniem | km/h | 7/8 |
| Prędkość unoszenia bez obciążenia/z obciążeniem | MM/S | 120/190 | |
| Prędkość opuszczania bez obciążenia/z obciążeniem | MM/S | 190/170 | |
| Prędkość przodu | MM/S | 100/100 | |
| Maksymalna zdolność wspinania pusta/z obciążeniem | % | 3/3 | |
| Metoda hamowania | elektromagnetyczny hamulec | ||
| Silnik | moc napędowa silnika | KW | 1*2 |
| Moc silnika kierowniczego | KW | 0.4*3 | |
| Moc silnika podnoszenia | KW | 8.6 | |
| Napięcie/POjemność baterii litowych | W/AH | 48/210 | |
| Waga baterii litowej | kg | 150 | |
| Tryb kierowania | Elektroniczne sterowanie | ||
1.Rozprowadzanie materiałów w warsztacie, redukowanie liczby operatorów w przejściach warsztatowych oraz tworzenie ekologicznej fabryki chemikaliów.
2.Układanie magazynów fabrycznych sprawia, że magazynowanie jest bardziej standardowe i uporządkowane, w pełni poprawiając wykorzystanie przestrzeni i efektywność transportu.






Profesjonalne przedsiębiorstwo zajmujące się projektowaniem, produkcją i sprzedażą narzędzi podnoszących oraz systemów zasilania.
 EN
EN
 AR
AR
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 SQ
SQ
 HU
HU
 TH
TH
 TR
TR
 AF
AF
 MS
MS
 BN
BN
 MN
MN
 KK
KK
 KY
KY






