Метод навигации: Лазерный SLAM
Грузоподъемность: 1000kg
Радиус поворота: 1600 мм
Высота подъема: ≤4000 мм
Скорость ходьбы: ≤1.2 м/с
Ширина вилки: 280/750 мм
Батарея: литиевая батарея
Размеры: 2800 * * 1700mm 2800
Способ вождения: привод с сервоприводом.
Способ зарядки: ручная/автоматическая зарядка
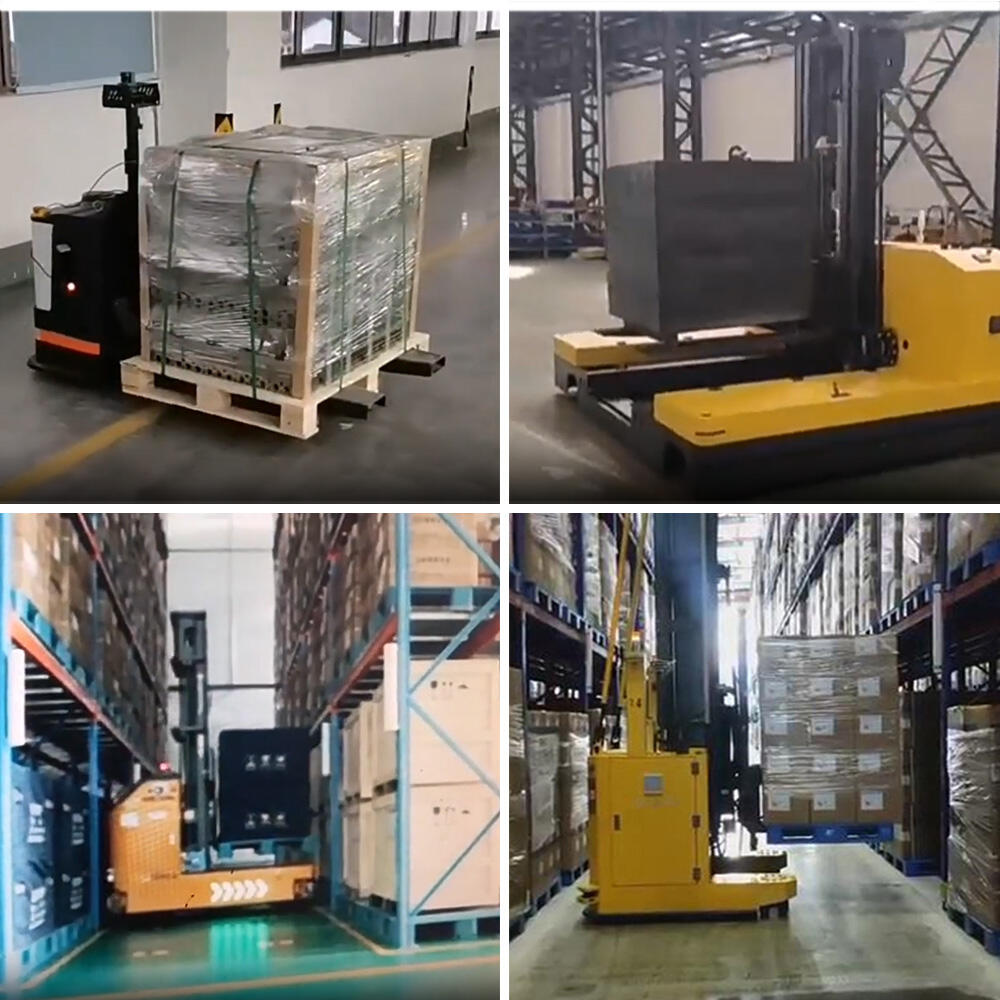
Лазерный вилочный погрузчик AGV с нагрузкой 2000 кг может поднимать до 6000 мм. На основе данных, полученных от датчиков LiDAR, алгоритм SLAM используется для построения карт и выполнения функций позиционирования и навигации во время движения робота. Передовая технология лазерной навигации не требует какой-либо маркировки на земле или отражающих панелей. Робот может автоматически останавливаться/обходить препятствия во время движения, раздваивать товары и размещать их в обозначенных местах. Оснащен функцией автономной зарядки. Робот разработал несколько стратегий защиты с точки зрения программного и аппаратного обеспечения и оснащен предохранительными контактами и кнопками аварийной остановки вокруг робота, чтобы обеспечить общую безопасность и стабильность.
| Характеристика | Тип питания | Электрический | |
| Вождение Тип | Автоматический | ||
| Режим навигации | Лазер | ||
| Номинальная нагрузка | Q (кг) | 2000 | |
| Центр загрузки | С (мм) | 600 | |
| Расстояние нагрузки | Х (мм) | 550 | |
| колесная база | Y (мм) | 1180 | |
| Размер ведущего колеса | (Мкм) | Φ250 * 85 | |
| Размер вспомогательного колеса | (Мкм) | Φ210 * 70 | |
| Ширина передней колеи | B11 (мм) | 2050 | |
| Размер | Общая высота | h1 (мм) | 2800 |
| Высота подъема | h3 (мм) | 6000 | |
| Высота вилки (минимум) | h13 (мм) | 60 | |
| Общая длина | L1 (мм) | 2800 | |
| Длина автомобиля | L2 (мм) | 540 | |
| габаритная ширина | b1 (мм) | 1700 | |
| Размер вилки | s / e / l (мм) | 45 X 140 X 1150 | |
| Внешняя ширина вилки | b5 (мм) | 280/750 | |
| Вилка грабли | L4 (мм) | 1200 | |
| Минимальный клиренс | m2 (мм) | 60 | |
| Ширина канала штабелирования под прямым углом, лоток 1000x1200 мм | Аст (мм) | 1960 | |
| Радиус поворота | Wa (мм) | 1600 | |
| эффективности | Скорость движения без нагрузки/полная нагрузка | км / ч | 7/8 |
| Скорость подъема без нагрузки/полная нагрузка | мм / с | 120/190 | |
| Снижение скорости без нагрузки/полная нагрузка | мм / с | 190/170 | |
| Скорость движения вперед | мм / с | 100/100 | |
| Максимальная грузоподъемность при пустой/полной загрузке | % | 3/3 | |
| Метод торможения | Электромагнитный тормоз | ||
| Мотор | Мощность приводного двигателя | kw | 1*2 |
| Мощность рулевого двигателя | kw | 0.4*3 | |
| Подъемная мощность двигателя | kw | 8.6 | |
| Напряжение/емкость литиевой батареи | В / А | 48/210 | |
| Литиевая батарея вес | kg | 150 | |
| Режим рулевого управления | Электронное рулевое управление | ||
1. Распределение материалов в цехах, сокращение числа операторов в цехах и создание экологически чистого химического завода.
2. Штабелирование заводских складов делает складирование более стандартизированным и упорядоченным, полностью улучшая использование пространства и эффективность транспортировки.






Профессиональное предприятие, занимающееся проектированием, производством и продажей подъемных инструментов и систем электропитания.
 EN
EN
 AR
AR
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 НЕТ
НЕТ
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 SQ
SQ
 HU
HU
 TH
TH
 TR
TR
 AF
AF
 MS
MS
 BN
BN
 MN
MN
 KK
KK
 KY
KY






