วิธีการนำทาง: เลเซอร์สแลม
โหลดความจุ: 1000kg
รัศมีวงเลี้ยว : 1600 มม
ความสูงในการยก: ≤4000มม
ความเร็วในการเดิน: ≤1.2m/s
ความกว้างของส้อม:280/750มม
แบตเตอรี่: แบตเตอรี่ลิเธียม
ขนาด: 2800 * * * * * * * * 1700 2800mm
วิธีการขับขี่: ขับเคลื่อนล้อเซอร์โว
วิธีการชาร์จ: การชาร์จด้วยตนเอง/อัตโนมัติ
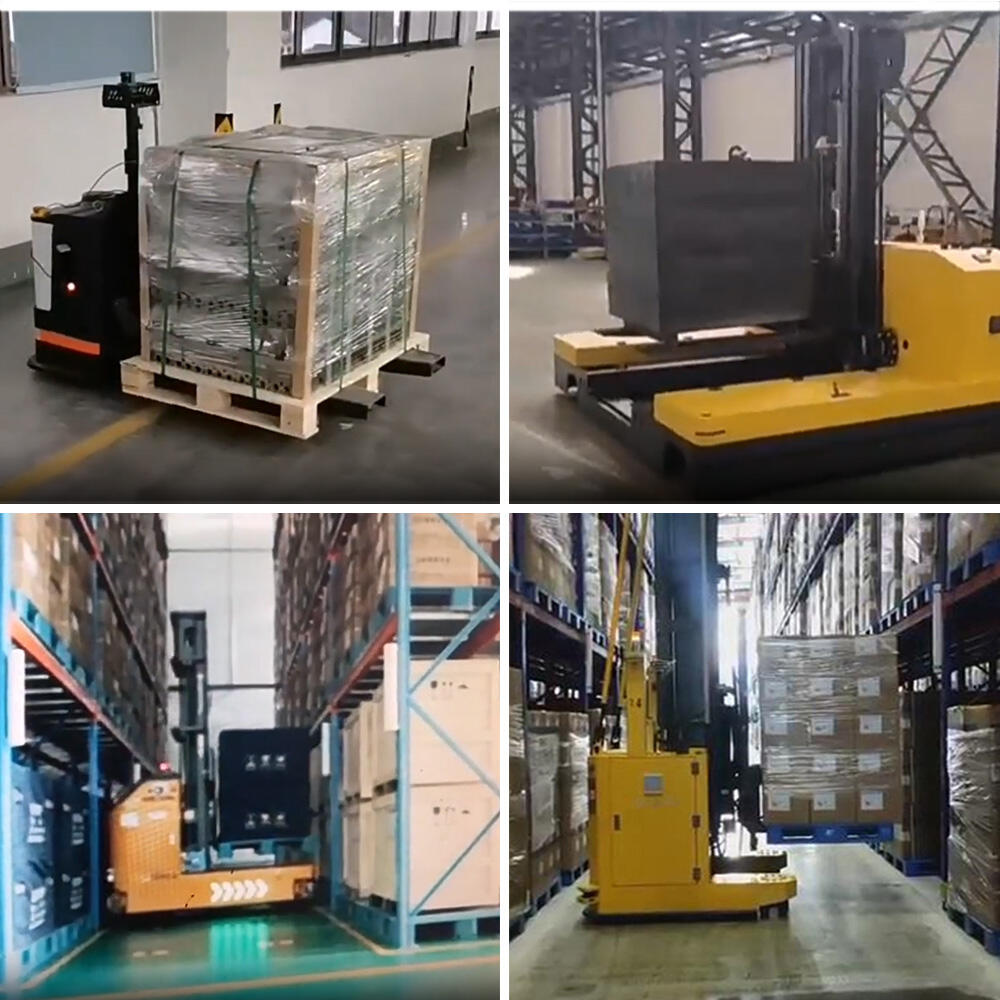
รถยกแบบเลเซอร์ AGV สามารถรับน้ำหนักได้ 2000 กิโลกรัม สามารถยกได้สูงสุด 6000 มิลลิเมตร จากข้อมูลที่ได้รับจากเซ็นเซอร์ LiDAR อัลกอริธึม SLAM จะถูกใช้เพื่อสร้างแผนที่และทำหน้าที่กำหนดตำแหน่งและการนำทางระหว่างการเคลื่อนไหวของหุ่นยนต์ เทคโนโลยีการนำทางด้วยเลเซอร์ขั้นสูงไม่จำเป็นต้องมีเครื่องหมายใดๆ บนพื้นหรือแผงสะท้อนแสง หุ่นยนต์สามารถหยุด/หลีกเลี่ยงสิ่งกีดขวางระหว่างการเคลื่อนที่ได้โดยอัตโนมัติ แยกสินค้าและวางไว้ในตำแหน่งที่กำหนด มาพร้อมกับฟังก์ชั่นการชาร์จอัตโนมัติ หุ่นยนต์ออกแบบกลยุทธ์การป้องกันความปลอดภัยหลายรูปแบบในแง่ของซอฟต์แวร์และฮาร์ดแวร์ และมีการติดตั้งหน้าสัมผัสด้านความปลอดภัยและปุ่มหยุดฉุกเฉินรอบๆ หุ่นยนต์เพื่อให้มั่นใจในความปลอดภัยและเสถียรภาพโดยรวม
| ลักษณะเฉพาะ | ประเภทไฟฟ้า | ติดตั้งระบบไฟฟ้า | |
| ประเภทการขับขี่ | อัตโนมัติ | ||
| โหมดการนำทาง | เลเซอร์ | ||
| โหลดยอดนิยม | คิว (กก.) | 2000 | |
| โหลดศูนย์ | C (มม.) | 600 | |
| โหลดระยะทาง | เอ็กซ์ (มม.) | 550 | |
| ระยะฐานล้อ | Y (มม.) | 1180 | |
| ขนาดล้อขับเคลื่อน | (มม. ) | Φ250 * 85 | |
| ขนาดล้อเสริม | (มม. ) | Φ210 * 70 | |
| ความกว้างของแทร็กด้านหน้า | b11 (มม.) | 2050 | |
| ขนาด | รวมความสูง | h1 (มม.) | 2800 |
| ยกสูง | h3 (มม.) | 6000 | |
| ความสูงของส้อม (ที่ต่ำสุด) | h13 (มม.) | 60 | |
| ความยาวรวม | L1 (มม.) | 2800 | |
| ความยาวรถ | L2 (มม.) | 540 | |
| ความกว้างโดยรวม | B1 (mm) | 1700 | |
| ขนาดส้อม | s / e / l (มม.) | 45X140X1150 | |
| ความกว้างด้านนอกของส้อม | b5 (มม.) | 280/750 | |
| ส้อมคราด | L4 (มม.) | 1200 | |
| กวาดล้างดินขั้นต่ำ | ม2(มิลลิเมตร) | 60 | |
| ความกว้างของช่องซ้อนมุมฉาก ถาด 1000x1200 มม. | Ast (มม.) | 1960 | |
| รัศมีการเลี้ยว | วา (mm) | 1600 | |
| ประสิทธิภาพ | ความเร็วในการขับขี่ ไม่มีโหลด/โหลดเต็ม | km / h | 7/8 |
| ความเร็วในการยก ไม่มีโหลด/โหลดเต็ม | มม./วินาที | 120/190 | |
| ลดความเร็วไม่มีโหลด/โหลดเต็ม | มม./วินาที | 190/170 | |
| ความเร็วไปข้างหน้า | มม./วินาที | 100/100 | |
| ความสามารถในการปีนเขาสูงสุดว่าง/โหลดเต็ม | % | 3/3 | |
| วิธีการเบรก | เบรกแม่เหล็กไฟฟ้า | ||
| เครื่องยนต์ | ขับเคลื่อนมอเตอร์ไฟฟ้า | kw | 1*2 |
| กำลังมอเตอร์พวงมาลัย | kw | 0.4*3 | |
| กำลังยกมอเตอร์ | kw | 8.6 | |
| แรงดัน/ความจุแบตเตอรี่ลิเธียม | V / อา | 48/210 | |
| น้ำหนักแบตเตอรี่ลิเธียม | kg | 150 | |
| โหมดบังคับเลี้ยว | พวงมาลัยอิเล็กทรอนิกส์ | ||
1. การกระจายวัสดุการประชุมเชิงปฏิบัติการ ลดผู้ปฏิบัติงานทางเดินในการประชุมเชิงปฏิบัติการ และสร้างโรงงานเคมีสีเขียว
2.การซ้อนคลังสินค้าของโรงงานทำให้คลังสินค้ามีมาตรฐานและเป็นระเบียบมากขึ้น ปรับปรุงการใช้พื้นที่และประสิทธิภาพการขนส่งอย่างเต็มที่






องค์กรมืออาชีพที่มีส่วนร่วมในการออกแบบ การผลิต และการขายเครื่องมือยกและระบบจ่ายไฟ
 EN
EN
 AR
AR
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 SQ
SQ
 HU
HU
 TH
TH
 TR
TR
 AF
AF
 MS
MS
 BN
BN
 MN
MN
 KK
KK
 KY
KY






